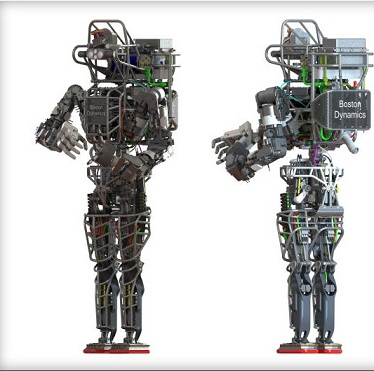
اخیرا دارپا، آژانس طرحهای پژوهشی پیشرفته و دفاعی ایالات متحده از وحشت آورترین روباتی که تا بحال دیدهایم پردهبرداری کرده است. این روبات عظیم الجثه که 6 فوت قد دارد و توسط بوستون داینامیکس طراحی شده است قرار نیست کسی را بکشد، بلکه آمده است تا کمک حال ما باشد.
این روبات که اطلس نام دارد متشکل از 28 مفصل هیدرولیکی است و یکی از پیشرفتهترین روباتهای انسان شکلی است که تا به حال ساخته شده است.
فعلا قرار نیست که از سوی این روباتهای دوپا در معرض خطر باشیم، اما سنسورهای بهتر، راهاندازهای مفصل شکل و برنامهها و سیستمهای کنترلی پیشرفتهتر باعث میشوند که روباتها بیش از پیش شبیه به ما انسانها شوند.
پس از بیش از 30 سال که از ساخت روباتها میگذرد، به زودی شاهد حضور آنها در میان خود خواهیم بود.
در مقاله زیر تکامل روباتیکی را که این چند ساله به وقوع پیوسته است با تصاویر مرتبط گرد آوردهایم.
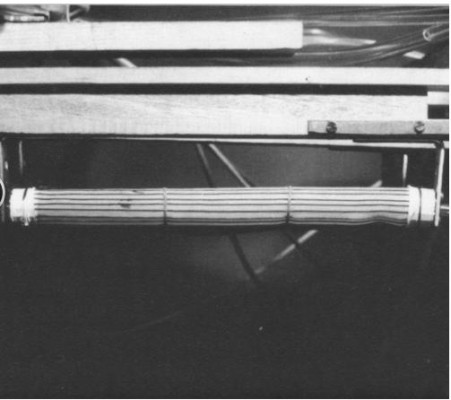
ماهیچه مصنوعی پلاستیکی 1967
سال 1967 بود که ماهیچهای مصنوعی توسط پرفسور ایشیرو کاتو و تیمش در دانشگاه وسدا در کشور ژاپن که یکی از مراکز ساخت روبات است ساخته شد. پلاستیک در چند رشته به دور محوری طولی برای اولین بار حرکاتی شبیه به حرکات ماهیچهای ایجاد کرد که به دلیل فشار وارد شده از طرفین به صورت طولی و توسط رشتهها منقبض میشد.
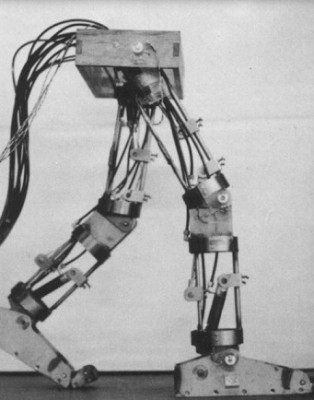
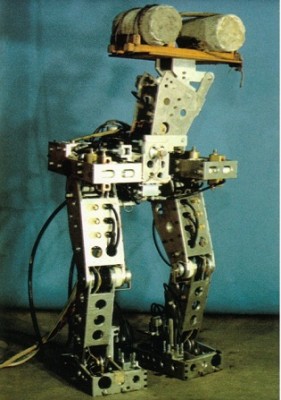
Master-slave walking machine, 1968
با استفاده ازمدل حرکتی اندام پایینی، WL-3 که یک محرک فرمان یار الکتروهیدرولیک داشت و با روش ارباب برده کنترل میشد در دانشگاه وسدا ساخته شد.
WL-3 برای اولین بار حرکت انسان گونه را در حال قدم برداشتن و ایستادن تقلید میکرد. فرم ساخت آن بگونهای بود که به اندامها اجازه نشستن و برخاستن میداد.
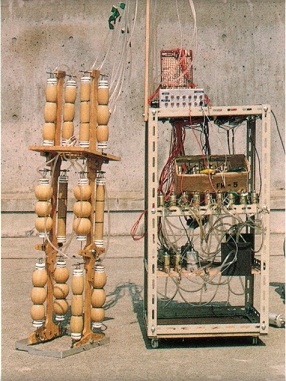
Artificial muscle made of rubber,1969
WAP-1 انسان شکل که با فشار هوا فعال میشد، متشکل از ماهیچههای مصنوعی ساخته شده از پلاستیک بود که برای ایجاد حرکت بهم متصل شده بودند.
Static Walking WL-5
WL-5 که با یک مینی کامپیوتر کنترل میشد میتوانست راه برود و مسیرش را تغییر دهد. این روبات ساخت دانشگاه وسدا با سرعت بسیار پایین هر قدم را در 45 ثانیه طی میکند.
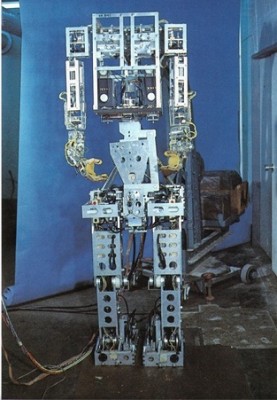
Wabot-1,1973
Wabot-1 اواین روبات تمام اندازه انسانی بود که در جهان ساخته شد. این روبات متشکل از سیستم کنترل اندامی، سیستم بینایی و پلت فرم ارتباطی بود.
سنسورها به Wabot اجازه میدادند که فاصله و جهت اشیا را اندازه بگیرد. این روبات قادر بود حرکت کند و اشیا را با دستانی که مجهز به سنسورهای لمسی بود بگیرد.
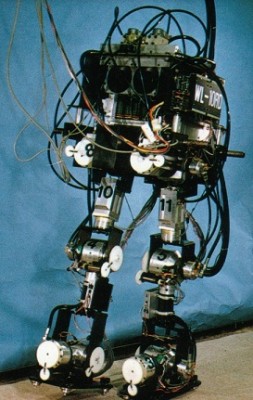
Realization of Dynamic Walking, 1984
مدل WL-10RD ساخت دانشگاه وسدا دارای مفاصل لگنی و قوزک بود که به تعادل بهتر روبات زمان قدم برداشتن کمک میکرد.
این پیشرفت در تکنولوژی ساخت روباتها، راه رفتن را برای اولین بار در 1.3 ثانیه میسر میکرد.

Shadow,1987
شادو که توسط ریچارد گرین هیل ساخته شد هدفش کمک به انجام کارهای روزانه بود.

Manny,1989
روبات ساخته شده توسط آزمایشگاه ملی شمال غربی اقیانوس آرام که مانی نام داشت در ساال 1989برای ارتش آمریکا ساخته شد. مانی به اندازه واقعی یک انسان بود، اما از هیچ نوع هوش و حرکت خودکاری برخوردار نبود.

P2,1996
روبات 6 فوتی با وزن 460 پوند اندرویدی بود که با باتری کار میکرد. این روبات 20 دسامبر در توکیو معرفی شد.
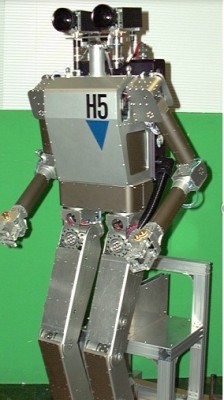
HP,1998
سال 1998 بود که آزمایشگاه جوهو سیستم کوگاک واقع در دانشگاه توکیو H5 android تمام اندازه را ساخت.
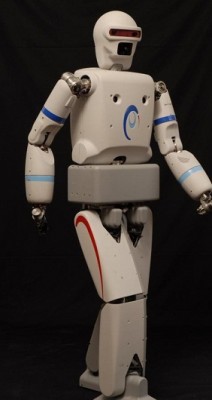
Reem-A,2005
Reem-A با قابلیت دیدن، صحبت کردن، دست کاری کردن و راه رفتن در سال 2005 کامل شد. سال 2006 این روبات در مسابقات روبوکاپ برمن شرکت کرد و به مرحله نیمه نهایی در بخش شوتهای پنالتی رسید و و مقام اول را در بخش راه رفتن دریافت کرد.
سال 2007 با استفاده از همان نرم افزار سال 2006، ریم ای در مسابقات روبوکاپ آتلانتا شرکت کرد و دوباره یکی از فینالیستهای شوتهای پنالتی شد.

Robothespian,2005
این روبات که در کشور انگلستان به دنیا آمده است به طور کامل قادر به انجام رفتار متقابل است، به چند زبان صحبت میکند و کاربر دوست است. مورد جالب توجه در این روبات قابلیت ارتباط آن با انسانهاست. در حال حاضر این روبات به قیمت 85000 دلار برای فروش موجود است.

HRP-3 Promet,2007
HRP-3 Promet Mk-II, HRP-2 Promet و HRP-3 Prototype سه روبات انسان شکل هستند که در 21 جون سال 2007 در نشست خبری Promet Mk-II در آزمایشگاه صنعتی کاوادا در شهر هاگا که در نزدیکی یوتسونومیا قرار دارد به نمایش گذاشته شدند.
این روباتهای 160 سانتی متری با وزن 68 کیلو گرم مدل آپگرید شده HPR-2 Promet هستند که با همکاری صنایع کاوادا، انستیتو ملی فن آوری و علوم صنعتی پیشرفته و صنایع سنگین کاوازاکی تولید شدهاند.
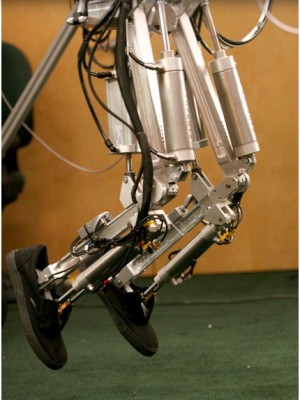
Dexter,2007
کمپانی Anybots واقع در منطقه Mountain View ایالت کالیفرنیا دو روبات به نامهای دکستر و مانتی را تولید کرد.
دکستر که در تصویر مشغول پریدن است دو پا دارد، قدش در حالت ایستاده 5 فوت و 10 اینچ بوده و وزنش 135 پوند است. اومیتواند راه برود، بپرد و بدن خود را به صورت پویا متعادل سازد تا بتواند مانند یک انسان بیستد.
این کمپانی سیستمی را برای روباتها ایجاد کرده است که از طریق آن روباتها قادرند بین بالا و پایین تمیز قایل شوند. این سیستم با استفاده از همین اطلاعات دایما در حال تنظیم ماهیچهها یا سیلندرهای هوا در پاهای روبات است.

Aero-blue,2008
این روبات در رقابتهای برگزار شده در کاگاوای کاوازاکی لباسها را از سبد بر میداشت و تا میزد. توانایی روباتها در انجام کارهای روزانه روز به روز در حال افزایش است.

Honda’s Asimo
آسیمو روبات انسان نما، در اولین مسابقات قهرمانی آمریکا که در روز 28 آپریل سال 2011 در سین لوییس برگزار شد به نمایش درآمد.

Physical Intelligence
روباتها با سیستمهای کنترلی بهتر، سنسورهای پیشرفتهتر و محرکهای طبیعیتر قادر به راهبری در محیطهای پیشرفتهتر هستند و میتوانند از ابزاری که برای انسانها طراحی شده استفاده کنند.
اینکه روبات بعدی چگونه خواهد بود پرسشی است که هم هیجان و کنجکاوی انسانها را بر میانگیزد و هم در دل آنها رعب و وحشت ایجاد خواهد کرد.
اوایل سال جاری درمجله دفاع ملی، پرفسور شیمی دانشگاه کالیفرنیا واقع در لوس آنجلس جیمز کی گیمزوفسکی اظهار داشت که با تقلید از رفتارهای خود ساخته مغز، به زودی باید منتظر انقلابی شگرف در سیستم روباتیک باشیم.
گیمزوفسکی در حال همکاری با دارپا در پروژهای به نام Physical Inteligence است.
او در این باره میگوید: ” به جای اینکه مانند آنچه در کامپیوترها اتفاق میافتند، اطلاعات را از حافظه به پردازشگر منتقل کنیم، در روباتهای جدید پردازش اطلاعات به صورت کاملا نوینی انجام خواهد گرفت.”





